 选择语言:
选择语言:



9月2日音讯,哈尔滨工程大学船只工程学院李国瑞教授团队研制的电液驱动深海软体机器人,近来成功完结4070米深海实验。
该机器人机身集成了控制电路、传感器与电池等组件。课题组针对软体驱动器、光学传感器、电子元件及软基体等要害部分进行了力学优化,显着提升了机器人在高压深海环境下的应力稳定性。
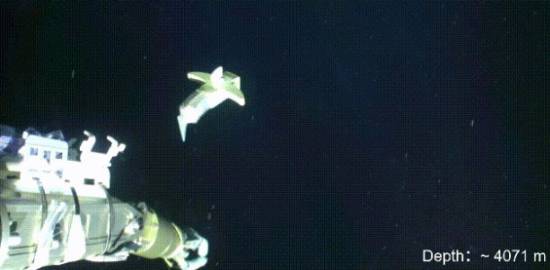
其立异之处在于,柔性电液单元内部的介电液体可以与深海海水压力完成主动平衡,使机器人无需额定耐压外壳即可习惯全海深规模的极点压力环境。
机器人经过自带的小型化动力体系驱动多个柔性电液单元协同作业。当软基体中的电子器件发生高压电信号时,电液单元在电压效果下构成相似“流体静力骨骼”的变形机制,然后推进机器人在深海中完成直行、转弯等多种运动。

此外,该机器人还搭载了微型深海光学感知体系,可在极点环境下实时监测本身运动状况与周围环境。
现在,团队正进一步展开小型化深海软体机器人在驱动、感知、通讯一体化集成及集体智能等方面的研讨。
李国瑞表明,未来团队将继续攻关极点环境下柔性配备在资料耐久性、体系可靠性与智能化水平等方面的要害技术,拓宽深海柔性勘探配备的使用远景。例如,可利用集体软体机器人低扰动融入深海生物群落或矿区施行原位勘探,或凭借软体机器手完成软弱样本的无损收集与精密操作。

